今回は電源回路の改良に挑戦したいと思います。
ロボットの稼働にはエネループを使用していますが、たまにロボットの動きがギクシャクするときがあります。
そこで、ロボット歩行時の電源回路の3.3V端子の電圧を計測してみました。以下がその結果です。
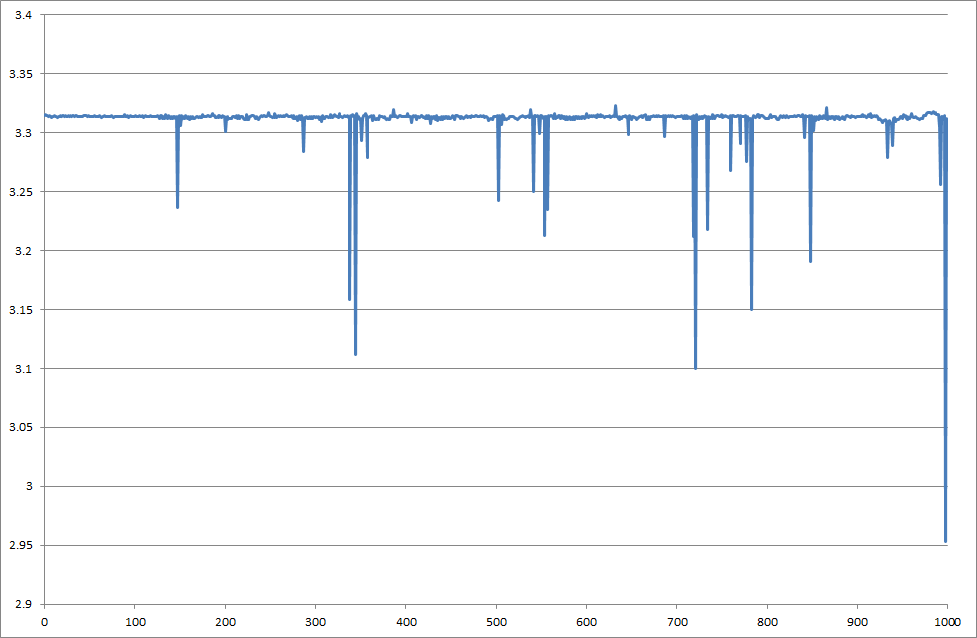
エネループ満充電後のロボット直進歩行時の3.3V端子電圧を100Hzで10秒間計測しています。
これをみると所々電圧低下が見られます。一応、使用しているマイコンのデータシートを確認すると電源電圧は3.0Vから3.6Vの範囲内であれば動くようですが、満充電直後にもかかわらず一瞬とはいえ3.0Vを下回るのはよろしくありません。これではマイコンが安定してロボットの制御が出来なくなるのも納得です。
使用している三端子レギュレーターはNJM2391というものでドロップアウト電圧が1.1Vもあります。つまり、3.3Vを保つためには電池が常に4.4V以上の電圧を出力する必要があります。
しかし、既に紹介したようにサーボモータに大電流が流れると電池の内部抵抗のため電圧低下が起こりますので「常に4.4V以上」というのは厳しそうです。
そこで、ドロップアウト電圧が0.18Vという低損失のNJM2845を使ってみようと思います。
ロボットを分解してNJM2391三端子レギュレーターを基板から取り外し、代わりにNJM2845を半田付けします(サラッと書いていますが、作業はとても大変でした...)。
再び、ロボット歩行時の電源回路の3.3V端子の電圧を計測してみます。結果は以下の通りです。

非常に電圧が安定するようになりました!
ロボットのギクシャクした動きもなくなり、そのため、一回の充電での稼働時間が大幅に伸びました。
皆様もよろしければ参考にして頂ければと思います。
次回は今のところ未定です。
0 件のコメント:
コメントを投稿